
Dispositivo mestre da série VH500 com barramento EtherCAT
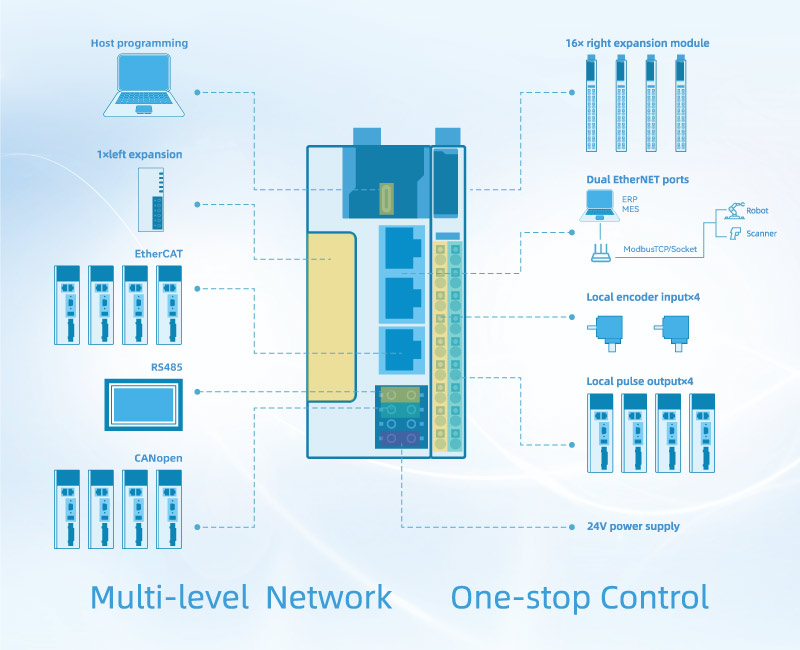
- Suporte ao controle de barramento EtherCAT e função de troca de rede de portas duplas. Comunicação de rede multicamada é realizada através de interfaces RS485, Ethernet, CAN, Ethernet e EtherCAT.
- - Aplicações:Amplamente utilizado em 3C, máquinas-ferramenta, equipamentos de embalagem, sistemas de montagem automatizados e outras áreas de controle inteligente industrial.
Características do produto
Processador central de 1G
A velocidade de processamento de comandos é significativamente maior do que os produtos anteriores, proporcionando controle de movimento de alta velocidade e alta precisão, além de controle de processo estável.
Rede multicamada
1×RS485 no produto para comunicação CANopen, até 72 dispositivos escravos EtherCAT.
Portas duplas Ethernet, permitindo fácil conexão entre redes.
Barramento + controle de movimento por pulso
Até 48 eixos reais para controle de movimento por barramento EtherCAT, totalizando 64 eixos reais e virtuais.
8×entradas/saídas de pulso de alta velocidade (200 kHz).
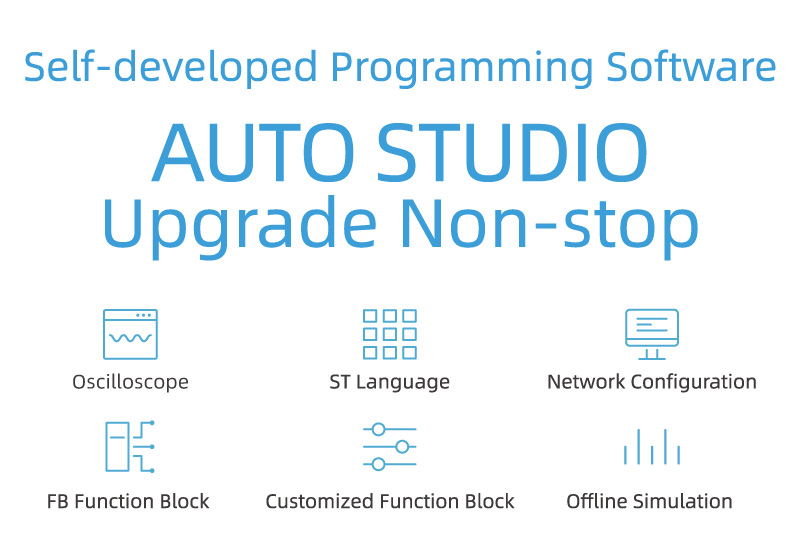
Software de programação desenvolvido internamente
Programação ST para escrever algoritmos e lógica complexos.
Funções de depuração offline e modificação online, reduzindo o tempo de ajuste no local.
Empacotamento modular de funções para rápida aplicação de algoritmos de processo.
48 eixos EtherCAT
Controle de barramento de alta velocidade de 48 eixos com função de movimento sincronizado, adequado para produção complexa. Controle rápido e preciso traz maiores benefícios aos usuários finais.
Layout simples, custos de design e mão de obra mais baixos, manutenção mais rápida.

Jerk ACC e DEC
Ajuste do valor de jerk torna as curvas ACC/DEC mais suaves, reduzindo impactos mecânicos.
Coordenadas: tempo
Primeira coordenada Y: velocidade
Segunda coordenada Y: aceleração
Terceira coordenada Y: taxa de variação da aceleração
A taxa de variação da aceleração ACC/DEC é obtida diretamente do tempo ACC/DEC, sem necessidade de cálculos.
Visualização da taxa de variação na suavidade da curva ACC/DEC.
Ethernet industrial avançado e mestre/escravo distribuído. Fácil instalação, aceleração do ciclo de transmissão de informações e comunicação e sincronização mais rápidas.
Interpolação linear, circular, cames e outros modos.
Barramento de movimento EtherCAT com ciclo de comunicação de até 250 μs.
Comandos multieixo, como e-gear e e-cam.
Comandos de movimento de eixo único, como posição, velocidade e origem.
Eixo principal, eixo real, entradas externas para encoder ou eixo virtual.
Sensores de servo, contadores de alta velocidade, sensores de encoder.
Estágios de compensação, sobreposição de movimento, etc.
Software de programação