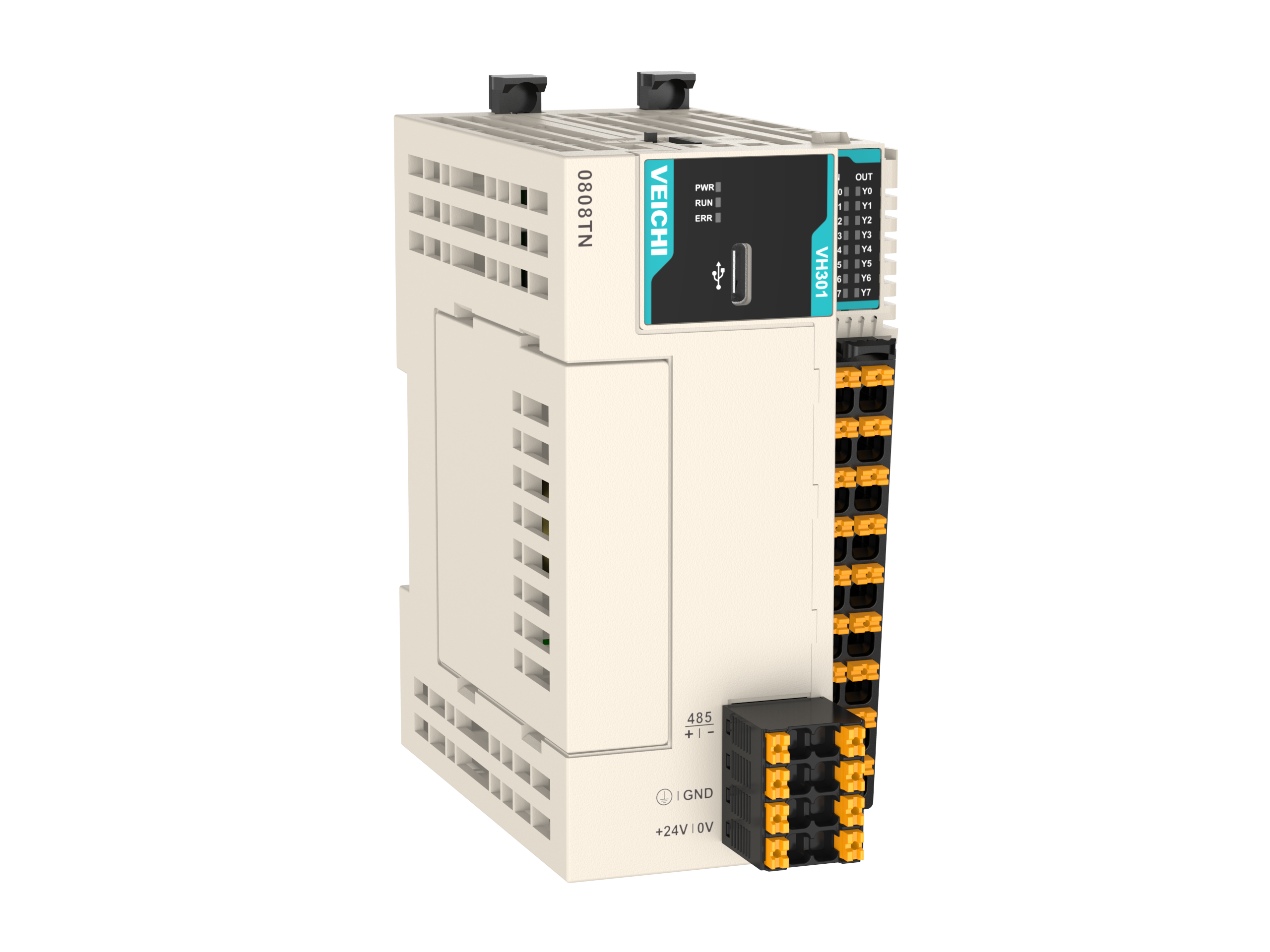
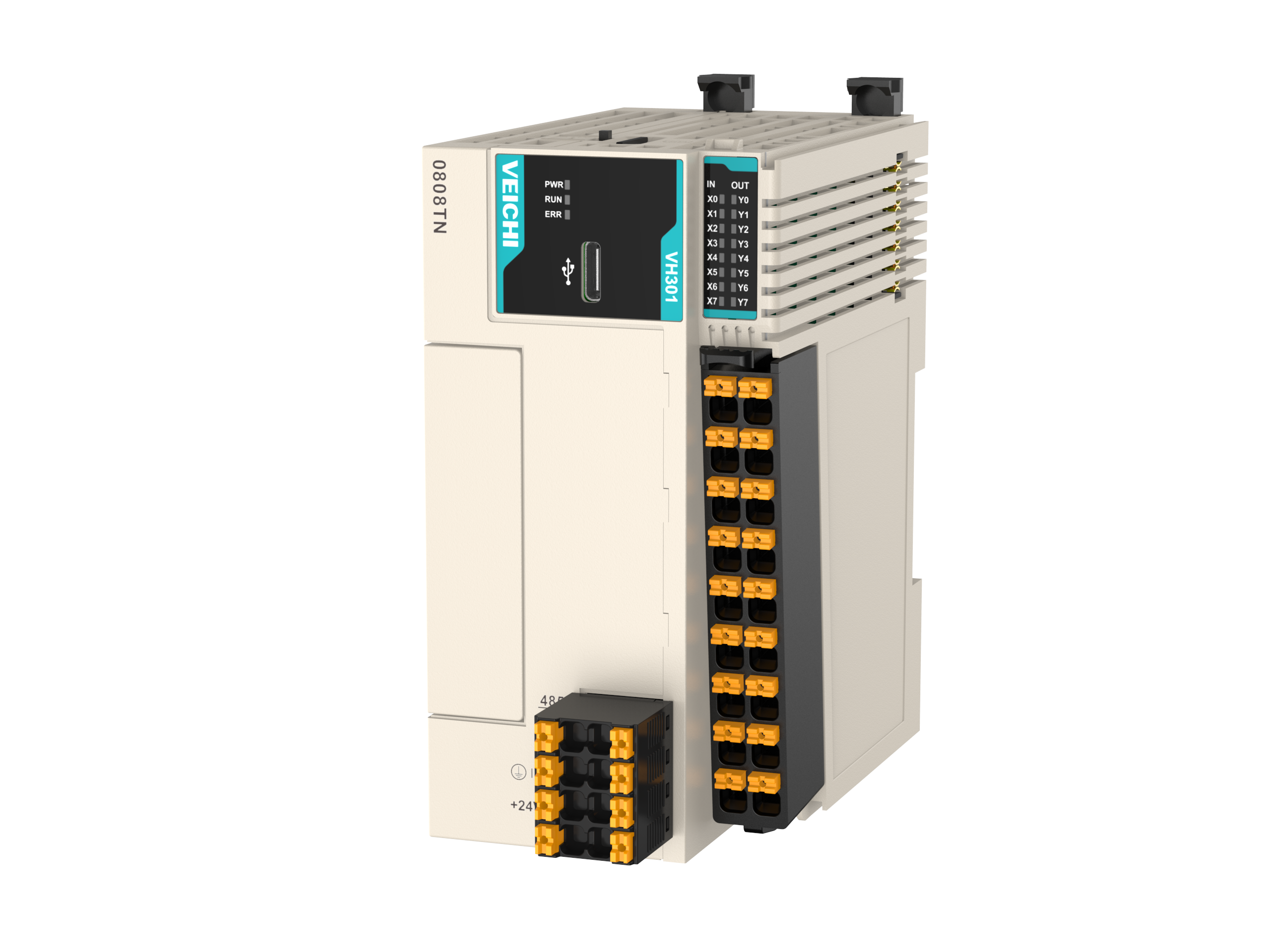

Série VH500 Maître de Bus EtherCAT
- Prend en charge le contrôle de bus EtherCAT et les fonctions de commutation réseau double port. Permet une communication réseau multicouche via les interfaces RS485, Ethernet, CAN et EtherCAT.
- - Champ d'Application:Large application dans les domaines 3C, machines-outils, machines d'emballage, systèmes d'assemblage automatisés et autres domaines de contrôle intelligent industriel.
Caractéristiques du Produit
Processeur Central 1G
La vitesse de traitement des commandes est nettement améliorée par rapport aux produits précédents, permettant un contrôle de mouvement haute vitesse, haute précision et un contrôle de processus stable.
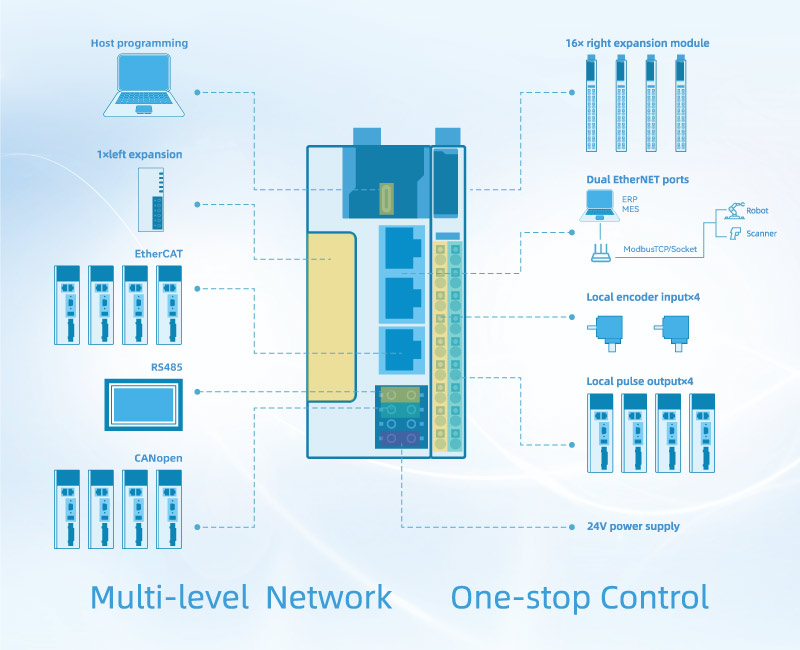
Réseau Multi-niveaux
1× port RS485 pour la communication CANopen, prenant en charge jusqu'à 72 esclaves EtherCAT.
Ports Ethernet doubles pour un réseautage inter-niveaux facile.
Bus + Contrôle de Mouvement par Impulsions
Jusqu'à 48 axes réels pour le contrôle de mouvement par bus EtherCAT, totalisant 64 axes réels et virtuels.
8× E/S d'impulsions haute vitesse (200kHz).
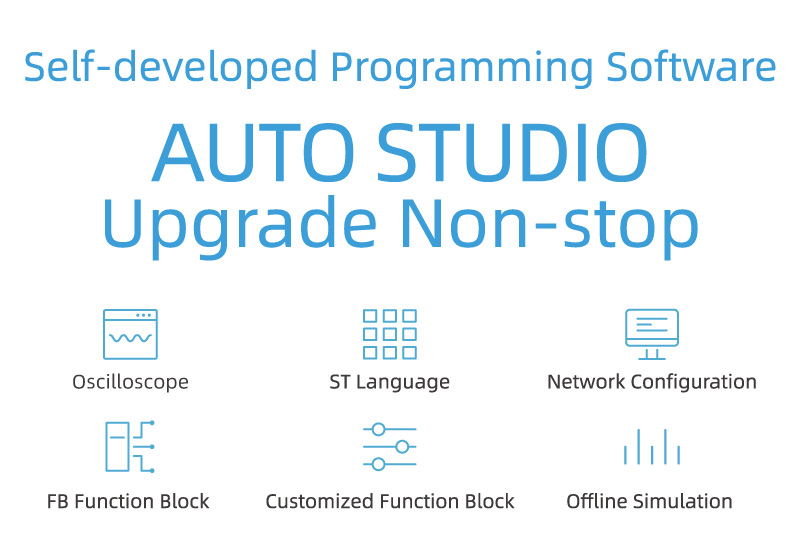
Logiciel de Programmation Autodéveloppé
Programmation ST pour écrire des algorithmes et logiques complexes.
Débogage hors ligne et modification en ligne pour réduire le temps de réglage sur site.
Blocs fonctionnels modulaires permettant une application rapide d'algorithmes de processus.
48 Axes EtherCAT
Contrôle de bus 48 axes haute vitesse avec capacités de mouvement synchrone, adapté à une production complexe. Un contrôle rapide et précis apporte des bénéfices supérieurs aux utilisateurs finaux.
Câblage simplifié réduisant les coûts de conception et de main-d'œuvre, avec une maintenance plus rapide.

Jerk ACC et DEC
Ajuste les valeurs de jerk pour lisser les courbes ACC/DEC et réduire l'impact mécanique.
Coordonnées : Temps
Premier axe Y : Vitesse
Deuxième axe Y : Accélération
Troisième axe Y : Taux de changement d'accélération
Le taux ACC/DEC est directement dérivé du temps ACC/DEC, aucun calcul nécessaire.
Visualise les changements de taux dans la douceur de la courbe ACC/DEC.
Ethernet industriel avancé et architecture maître/esclave distribuée. Installation facile, cycles de communication plus rapides et synchronisation.
Prend en charge l'interpolation linéaire circulaire, les cames et autres modes.
Bus de mouvement EtherCAT avec cycles de communication de 250μs.
Commandes multi-axes comme e-gear et e-cam.
Commandes mono-axe pour position, vitesse et origine.
Axe principal pour encodeurs/axes virtuels, axes réels et entrées externes.
Comprend des têtes de sonde, compteurs haute vitesse et interfaces d'encodeur.
Étapes de compensation, superposition de mouvement, etc.
Logiciel de Programmation